
Radk Hydro is a professional manufacturer of servo valves and proportional valves with 2 years of R&D experience. Our products are currently exported to more than 30 countries worldwide, and can fully replace equivalent products from MOOG, Rexroth and HAWE.Feel free to contact us anytime for product inquiries or professional selection guidance.
Q: I cannot easily tell servo valves and proportional valves apart. What are their key differences?
A: Both belong to continuously variable electrically controlled hydraulic directional valves. In German, they are called stetigventil. Generally, we classify them as proportional valves, which have two sub-types: servo valves and common proportional valves.
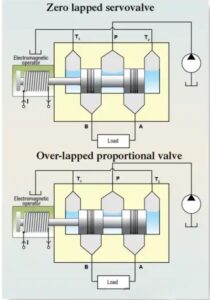
The core difference lies in valve overlap. Servo valves feature near zero overlap. Even a tiny spool movement will open the flow passage. In contrast, proportional valves have an overlap of 3% or more between the spool and valve body.
A research project by the Fluid Power Research Institute confirms this standard. To sum up: a servo valve has less than 3% overlap, while a proportional valve has 3% overlap or above.
Q: What is valve overlap?
A: Valve overlap, also known as valve lap, refers to the distance the spool moves from its neutral position to open the passages between pressure ports, working ports and tank ports.
For a zero-lap valve, a slight spool shift in either direction will open the flow path. Note that there is still minor clearance between the spool outer diameter and valve bore inner diameter. The term “zero overlap” is just a widely accepted general description.
Q: What is valve null?
A: Valve null is a specific point on the pressure gain curve of a servo valve. At this position, pressure at the two working ports is equal.
Servo valves are fitted with mechanical adjustment parts. When no electric power is supplied, you can adjust springs or magnetic force to balance the pressure of the two working ports. Factories usually set the null position for hydraulic cylinders with equal piston area during final testing.
If you use cylinders with unequal piston area, disconnect the valve connector and tweak the null adjuster until the cylinder stops creeping. In this case, pressure at the two working ports will not be equal due to different piston areas and external loads.
Q: What is null drift?
A: Null drift means the valve deviates from its set null position. For example, changes in oil temperature or supply pressure will cause null drift. You need to adjust the control current or mechanical null screw to reset the valve.
Null drift will create errors in closed-loop systems such as position or pressure control systems. This issue mainly affects zero-lap valves.
Q: Why is valve overlap the most critical distinguishing factor?
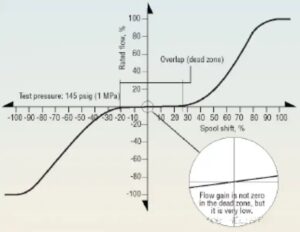
A: Proportional valves have an overlap of 3% or more. When the spool moves from the neutral position, a dead zone occurs. Flow will not rise obviously until the spool travels past the threshold position.
Servo valves adopt near-zero overlap. A small amount of overlap (within 3%) is allowed for normal manufacturing tolerance, and it barely affects system performance. In fact, slight overlap helps reduce internal leakage between the spool and valve bore.
Choose servo valves if your system requires high precision. For instance, if a 24-inch stroke cylinder needs to drive a 10,000-lb load at 15 inches per second with position error below 0.020 inches, a servo valve is necessary.
High-precision systems adopt null tracking mode. When the cylinder stays at the target position, the spool remains near the neutral point. Any tiny position change caused by external loads will be corrected instantly via minimal spool movement. Zero-lap structure enables the valve to respond to even minor disturbances in all directions.
Q: I need to select between servo valves and proportional valves for closed-loop applications. Servo valves deliver great performance, yet I worry about their high pressure loss. How should I choose?
A: Many users misunderstand pressure loss of the two valves. The difference comes from different flow rating standards, not actual flow capacity.
Servo valves are rated at a pressure differential of 1000 psi (7 MPa, ISO 10770-1). The test condition is: pressure port and tank port form a 1000 psi pressure difference, with two working ports connected together.
Proportional valves are rated at 145 psi (1 MPa, ISO 10770-1).
When selecting valves, we calculate the flow coefficient Kv. A properly selected servo valve and a properly selected proportional valve have the same Kv value, equal flow area and identical pressure loss in actual use. Neither type has an advantage in pressure loss. The industry rarely marks Kv values on products, which further leads to confusion.
Q: Why do many proportional valves have lower hysteresis than servo valves? Should servo valves be more accurate?
A: Hysteresis means inconsistent input-output curves when the control signal rises and falls. It is mainly caused by static friction, backlash and magnetic hysteresis, and it will trigger errors and null drift in hydraulic systems. Hysteresis is unavoidable for all valves.
Most standard servo valves use mechanical linkages between torque motors and main spools. Mechanical and magnetic hysteresis are obvious, with typical hysteresis below 2%.
Most proportional valves use LVDT (Linear Variable Differential Transformer) for spool position electronic feedback. This forms a tight closed loop for spool control and effectively cuts down hysteresis. Some multi-stage servo valves also adopt LVDT, with hysteresis lower than 0.5%. Such tiny hysteresis can hardly be detected by regular tests, and it will not cause obvious limit cycle oscillation under PID control.
Q: I heard proportional valves are more resistant to fluid contamination. Is this true?
A: This claim is questionable. Some people think direct-acting proportional valves work better because they have no small nozzles to clog. However, the nozzle orifice of nozzle-flapper servo valves is larger than 50 microns. Only extremely large particles can block it. If your hydraulic fluid contains so many 50-micron contaminants, the whole system will face severe failures long before the valve gets clogged.
Abrasive contaminants will wear valve surfaces and throttle edges. Servo valves and proportional valves share the same standard spool-to-bore clearance. Hard particles may cause spool sticking on either type of valve.
So far, there is no unified international standard to test the contamination resistance of hydraulic valves. The most reliable solution is to keep hydraulic fluid clean. Install qualified filters and maintain good fluid cleanliness for the whole system.
Q: What is PWM?
A: PWM stands for Pulse Width Modulation. It is a common power switching method to realize proportional control.
The output stage of a PWM amplifier uses transistor switches. It adjusts the ratio of switch-on time and switch-off time to change average output current and voltage. The PWM frequency is fixed, ranging from 30 Hz to 40 kHz. This frequency is much higher than the response speed of hydraulic mechanical parts. As a result, valves and actuators only respond to the average current, not instantaneous pulses.
Take a 100 Hz PWM driver as an example. One full cycle lasts 10 ms. If the switch is on for 2 ms and off for 8 ms, the duty cycle is 20%, and the valve acts according to 20% of the full input signal. If on and off time are both 5 ms, the duty cycle is 50%.
PWM is widely used for proportional solenoid driving. It reduces heat generation of amplifiers while keeping stable output power. Besides, proper PWM frequency creates slight dither on moving mechanical parts. This dither eliminates static friction and further reduces hysteresis, without causing obvious vibration of actuators.
Q: Can I mix different brands of valves and amplifiers? My engineer says Brand X servo valves work with Brand Y servo amplifiers, but Brand Z proportional valves can only match Brand Z amplifiers. Why?
A: Servo amplifiers have simple circuits and strong compatibility. Most servo valves are driven by torque motors, which only need current direction change to switch movement directions. As long as the amplifier provides matched current, it can drive most servo valves. The working current of torque motors is usually below 100 mA with low power consumption.
In comparison, proportional amplifiers have complex circuits and poor compatibility. Most proportional valves are equipped with LVDT for spool position detection. LVDT requires dedicated AC excitation circuits and signal demodulation modules. Besides, many proportional valves use two solenoids for bidirectional movement, so the amplifier needs to distribute reverse current to different solenoids.
For the above reasons, proportional amplifiers must be matched with designated valve models and brands.